使用 Tinc 组建虚拟局域网
以前曾经用过 ZeroTier 给自己多个分布在不同地方的设备组建大内网,后来用不着了,就没再折腾,前段时间又想重新组一下网,于是尝试了一下另一个同类的开源软件 Tinc。本文记录一下使用 Tinc 搭建虚拟网的关键步骤。
安装
Ubuntu/Debian 上直接 apt-get install tinc 安装,其它系统可以网上搜索,基本默认包管理器都可以直接安装。
节点结构
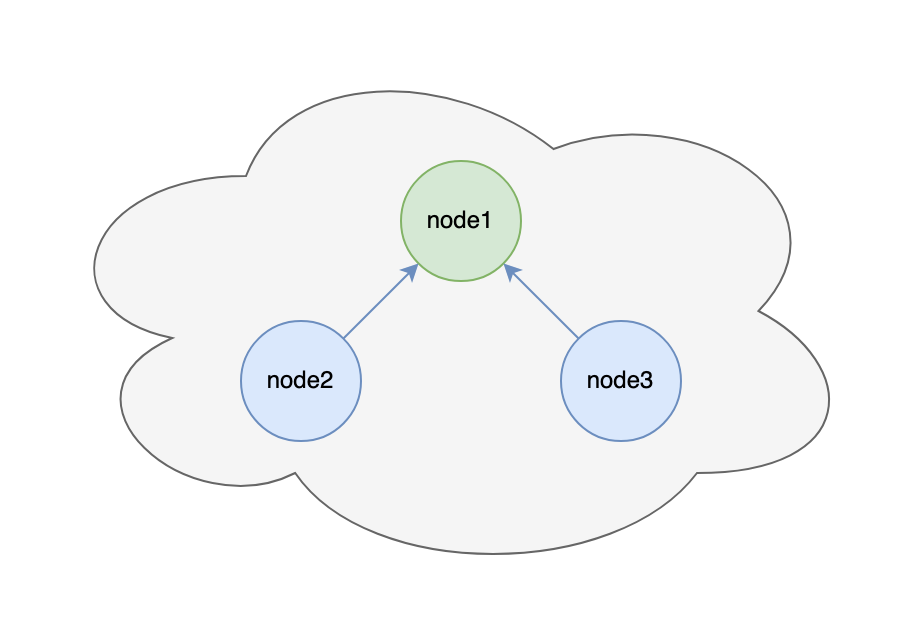
首先想好网络中的节点要如何相连,以三个节点、其中一个有公网 IP 为例,如下图,node2 和 node3 需要主动连接到 node1,从而交换相关元信息,并在 node1 的辅助下建立连接。
目录结构
在每个节点上创建如下目录结构:
/etc/tinc
└── mynet
├── hosts
│ ├── .
│ └── ..
├── .
├── ..
这里 mynet 是网络的名字,可以随意。mynet 目录里创建一个 hosts 子目录。
编写配置文件和启动脚本
在三个节点上分别编写配置文件和启动脚本。
node1
/etc/tinc/mynet/tinc.conf:
Name = node1
Interface = tinc # ip link 或 ifconfig 中显示的接口名,下同
Mode = switch
Cipher = aes-256-cbc
Digest = sha512
/etc/tinc/mynet/tinc-up(需可执行,以使用 ifconfig 为例):
#!/bin/sh
ifconfig $INTERFACE 172.30.0.1 netmask 255.255.255.0 # IP 根据需要设置,下同
/etc/tinc/mynet/tinc-down(需可执行,以使用 ifconfig 为例):
#!/bin/sh
ifconfig $INTERFACE down
node2
/etc/tinc/mynet/tinc.conf:
Name = node2
Interface = tinc
Mode = switch
ConnectTo = node1
Cipher = aes-256-cbc
Digest = sha512
/etc/tinc/mynet/tinc-up(需可执行,以使用 iproute 为例):
#!/bin/sh
ip link set $INTERFACE up
ip addr add 172.30.0.2/24 dev $INTERFACE
/etc/tinc/mynet/tinc-down(需可执行,以使用 iproute 为例):
#!/bin/sh
ip link set $INTERFACE down
node3
基本和 node2 相同,除了 Name = node3 以及 IP 不同。
生成 RSA 密钥对
在每个节点上执行下面命令来生成节点的公私钥:
tincd -n mynet -K 4096
私钥默认保存在 /etc/tinc/mynet/rsa_key.priv,公钥在 /etc/tinc/mynet/hosts/<node-name>,这里 <node-name> 在每个节点上分别是 node1、node2 和 node3(Tinc 能够从 tinc.conf 中知道当前节点名)。
交换密钥
将 node2 和 node3 的 /etc/tinc/mynet/hosts/node2 和 /etc/tinc/mynet/hosts/node3 拷贝到 node1 上的 /etc/tinc/mynet/hosts 中,此时 node1 目录结构如下:
/etc/tinc
└── mynet
├── hosts
│ ├── node1
│ ├── node2
│ └── node3
├── rsa_key.priv
├── tinc.conf
├── tinc-down
└── tinc-up
将 node1 的 /etc/tinc/mynet/hosts/node1 拷贝到 node2 和 node3,并在该文件开头加上一行:
Address = 1.2.3.4 # node1 的公网 IP
-----BEGIN RSA PUBLIC KEY-----
...
-----END RSA PUBLIC KEY-----
此时 node2 的目录结构如下:
/etc/tinc
└── mynet
├── hosts
│ ├── node1 # 包含 node1 的 Address
│ ├── node2
├── rsa_key.priv
├── tinc.conf
├── tinc-down
└── tinc-up
node3 和 node2 类似。
启动 Tinc
在每个节点上分别使用下面命令测试运行:
tincd -D -n mynet
该命令会在前台运行 Tinc,之后即可使用配置文件中配置的 IP 互相访问。
测试成功后可以杀掉刚刚运行的 tincd 进程,改用 systemctl 运行并开机自启动:
systemctl start tinc@mynet
systemctl enable tinc@mynet